Project 2.2: CPU
IMPORTANT INFO - PLEASE READ
The projects are part of your design project worth 2 credit points. As such they run in parallel to the actual course. So be aware that the due date for project and homework might be very close to each other! Start early and do not procrastinate.
Overview
In this project, you will use logisim-evolution to implement a 32-bit two-cycle processor based on RISC-V. Upon completion, you will have obtained the fundamental knowledge required to build a computer from scratch using only basic components. Additionally, you will have a better understanding to the basic principles of the internal operations of a computer.
- You are allowed to use any of Logisim's built-in blocks for all parts of this project.
- Save frequently and commit frequently! Try to save your code in Logisim every 5 minutes or so, and commit every time you produce a new feature, even if it is small.
- Tests for a completed CPU have been included with the lab starter code. You can run them with the command ./cpu-sanity.sh. See the Testing section for information on how to interpret your test output.
- Don't move around the given inputs and outputs in your circuit; this could lead to issues with the autograder.
- Because the files you are working on are actually XML files, they're quite difficult to merge properly. Do not work on the project in two places and attempt to merge your changes! If you are working separately from your partner, make sure that only one person is working on the project at any given time. We highly recommend pair programming on this project; understanding the nuts and bolts should help you experience your magical software-meets-hardware-I-actually-know-how-a-computer-works-now moment (and will prepare you to tackle datapath problems on exams).
Please read this document CAREFULLY as there are key differences between the processor we studied in class and the processor you designed in this project.
0) Obtaining the Files
- Clone your p2.2 repository from gitlab.
- In the repository add a remote repo that contains the framework files:
git remote add framework https://autolab.sist.shanghaitech.edu.cn/gitlab/cs110_23s/p2.2_framework.git - Go and fetch the files:
git fetch framework - Now merge those files with your master branch:
git merge framework/master - The rest of the git commands work as usual.
Resources
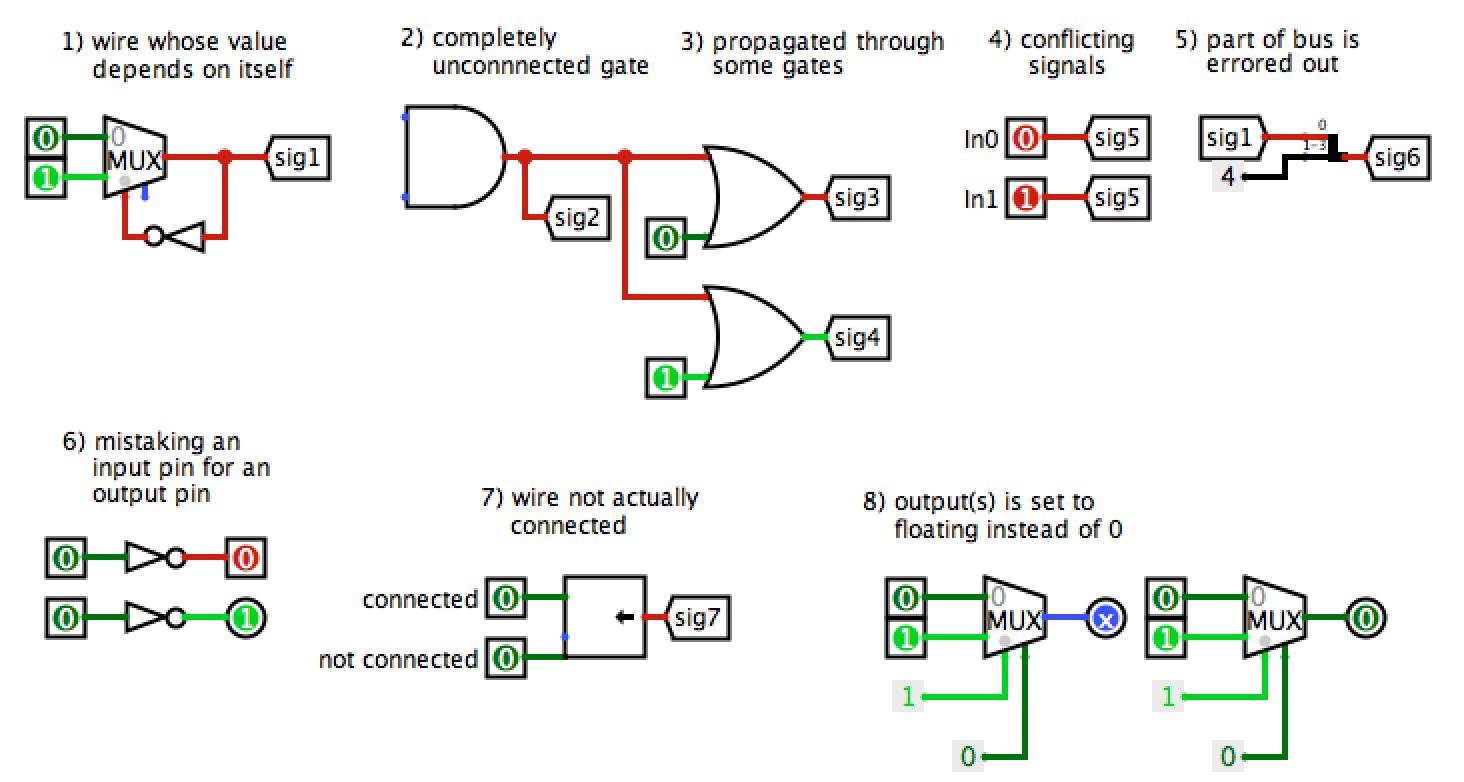
What do the different wire colors mean?
Some common sources of Logisim errors, for your debugging convenience:
1) Processor
We have provided a skeleton for your processor in cpu.circ. You will be using your own implementations of the ALU and RegFile as you construct your datapath. If you find somewhere need to change or find any errors in either of these components, you should definitely fix them. You are responsible for constructing the entire datapath and control from scratch. Your completed processor should implement the ISA detailed below in the section Instruction Set Architecture (ISA) using a two-cycle pipeline, with IF in the first stage and ID, EX, MEM, and WB in the second stage.
Your processor will get its program from the processor harness run.circ. Your processor will output the address of an instruction, and accept the instruction at that address as an input. Inspect run.circ to see exactly what's going on. (This same harness will be used to test your final submission, so make sure your CPU fits in the harness before submitting your work!) Your processor has 2 inputs that come from the harness:
| Input Name | Bit Width | Description |
| INSTRUCTION | 32 | Driven with the instruction at the instruction memory address identified by the fetch_addr (see below). |
| clk | 1 | The input of clock. As with the register file, this can be sent into subcircuits (e.g. the CLK input for your register file) or attached directly to the clock inputs of memory units in Logisim, but should not otherwise be gated (i.e., do not invert it, do not AND it with anything, etc.). |
Your processor must provide the following outputs to the harness:
| Output Name | Bit Width | Description |
| ra | 32 | Driven with the contents of ra. (FOR TESTING) |
| sp | 32 | Driven with the contents of sp. (FOR TESTING) |
| t0 | 32 | Driven with the contents of t0. (FOR TESTING) |
| t1 | 32 | Driven with the contents of t1. (FOR TESTING) |
| t2 | 32 | Driven with the contents of t2. (FOR TESTING) |
| s0 | 32 | Driven with the contents of s0. (FOR TESTING) |
| s1 | 32 | Driven with the contents of s1. (FOR TESTING) |
| a0 | 32 | Driven with the contents of a0. (FOR TESTING) |
| fetch_addr | 32 | This output is used to select which instruction is presented to the processor on the INSTRUCTION input. |
Just like with the ALU and RegFile, be careful NOT to move the input or output pins!
1.5) Memory
The memory unit should be implemented by you! Here's a quick summary of its inputs and outputs:
| Input/Output Name | Direction | Bit Width | Description |
| Address | In | 32 | Address to read/write data in Memory |
| Write Data | In | 32 | Value to be written to Memory |
| Write Enable | In | 1 | Equal to one on any instructions that write to memory, and zero otherwise |
| clk | In | 1 | Driven by the clock input to cpu.circ |
| Read Data | Out | 32 | Driven by the data stored at the specified address. |
Note that the memory is word-addressable, meaning given an address, it will return 4-byte data.
Note: Do not change the property of given RAM in mem.circ.
2) The Instruction Set Architecture
Your CPU will support the instructions listed below. Most of the instructions should behave the same as the RISC-V you learned in class. Notice that this is not all of the instructions on the green card! These are the only instructions you will be tested on implementing, but you will not be punished for implementing other instructions (the autograder will cover ONLY the instructions below). If anything surprises you, it is likely that we made a mistake. Please make a Piazza post about it.
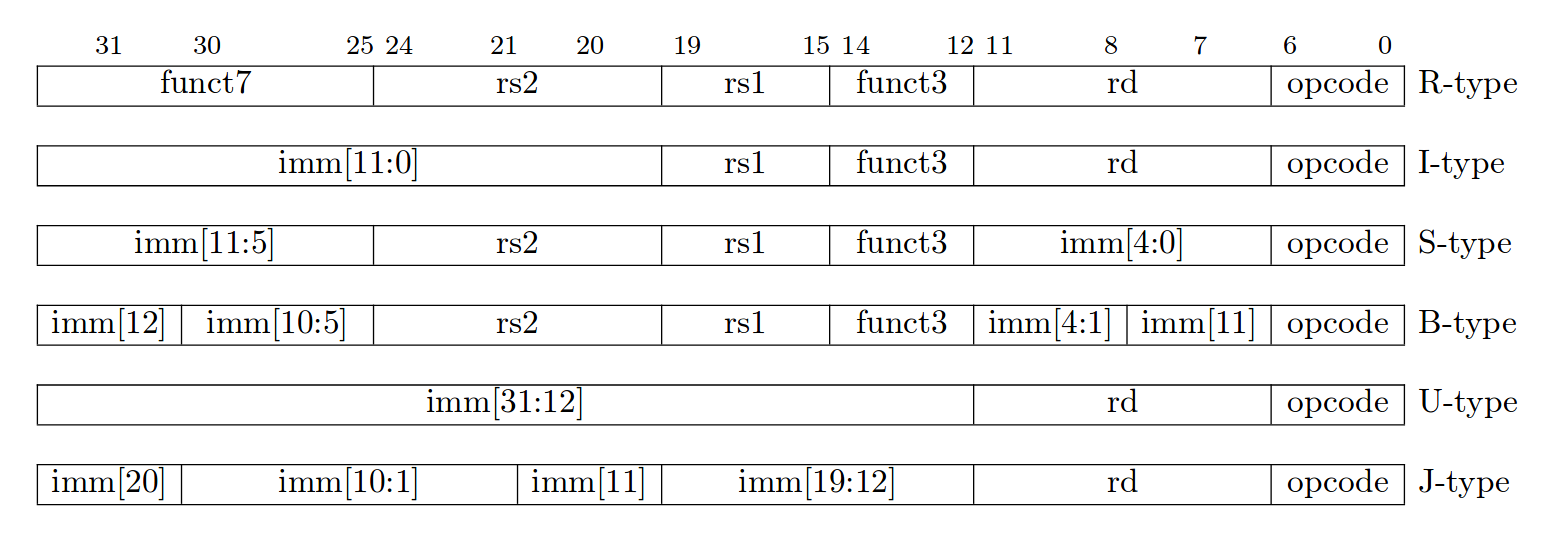
Instruction Formats
The Instructions
| Instruction | Type | Opcode | Funct3 | Funct7/IMM | Operation |
| add rd, rs1, rs2 | R | 0x33 | 0x0 | 0x00 | R[rd] ← R[rs1] + R[rs2] |
| mul rd, rs1, rs2 | 0x0 | 0x01 | R[rd] ← (R[rs1] * R[rs2])[31:0] | ||
| sub rd, rs1, rs2 | 0x0 | 0x20 | R[rd] ← R[rs1] - R[rs2] | ||
| sll rd, rs1, rs2 | 0x1 | 0x00 | R[rd] ← R[rs1] << R[rs2] | ||
| mulh rd, rs1, rs2 | 0x1 | 0x01 | R[rd] ← (R[rs1] * R [rs2])[63:32] | ||
| mulhu rd, rs1, rs2 | 0x3 | 0x01 | (unsigned) R[rd] ← (R[rs1] * R[rs2])[63:32] | ||
| xor rd, rs1, rs2 | 0x4 | 0x00 | R[rd] ← R[rs1] ^ R[rs2] | ||
| div rd, rs1, rs2 | 0x4 | 0x01 | R[rd] ← R[rs1] / R[rs2] | ||
| divu rd, rs1, rs2 | 0x5 | 0x01 | (unsigned) R[rd] ← R[rs1] / R[rs2] | ||
| srl rd, rs1, rs2 | 0x5 | 0x00 | R[rd] ← R[rs1] >> R[rs2] | ||
| or rd, rs1, rs2 | 0x6 | 0x00 | R[rd] ← R[rs1] | R[rs2] | ||
| remu rd, rs1, rs2 | 0x7 | 0x01 | (unsigned) R[rd] ← R[rs1] % R[rs2] | ||
| and rd, rs1, rs2 | 0x7 | 0x00 | R[rd] ← R[rs1] & R[rs2] | ||
| lb rd, offset(rs1) | I | 0x03 | 0x0 | R[rd] ← SignExt(Mem(R[rs1] + offset, byte)) | |
| lh rd, offset(rs1) | 0x1 | R[rd] ← SignExt(Mem(R[rs1] + offset, half)) | |||
| lw rd, offset(rs1) | 0x2 | R[rd] ← Mem(R[rs1] + offset, word) | |||
| lbu rd, offset(rs1) | 0x4 | (unsigned) R[rd] ← Mem(R[rs1] + offset, byte) | |||
| lhu rd, offset(rs1) | 0x5 | (unsigned) R[rd] ← Mem(R[rs1] + offset, half) | |||
| addi rd, rs1, imm | 0x13 | 0x0 | R[rd] ← R[rs1] + imm | ||
| slli rd, rs1, imm | 0x1 | 0x00 | R[rd] ← R[rs1] << imm | ||
| slti rd, rs1, imm | 0x2 | R[rd] ← (R[rs1] < imm) ? 1 : 0 | |||
| xori rd, rs1, imm | 0x4 | R[rd] ← R[rs1] ^ imm | |||
| srli rd, rs1, imm | 0x5 | 0x00 | R[rd] ← R[rs1] >> imm | ||
| ori rd, rs1, imm | 0x6 | R[rd] ← R[rs1] | imm | |||
| andi rd, rs1, imm | 0x7 | R[rd] ← R[rs1] & imm | |||
| sw rs2, offset(rs1) | S | 0x23 | 0x2 | Mem(R[rs1] + offset) ← R[rs2] | |
| beq rs1, rs2, offset | SB | 0x63 | 0x0 |
if(R[rs1] == R[rs2])
PC ← PC + {offset, 1b'0} |
|
| blt rs1, rs2, offset | 0x4 |
if(R[rs1] less than R[rs2] (signed))
PC ← PC + {offset, 1b'0} |
|||
| bltu rs1, rs2, offset | 0x6 |
if(R[rs1] less than R[rs2] (unsigned))
PC ← PC + {offset, 1b'0} |
|||
| bne rs1, rs2, offset | 0x1 |
if(R[rs1] != R[rs2])
PC ← PC + {offset, 1b'0} |
|||
| bgeu rs1, rs2, offset | 0x7 |
if(R[rs1] >= R[rs2] (unsigned))
PC ← PC + {offset, 1b'0} |
|||
| auipc rd, offset | U | 0x17 | R[rd] ← PC + {offset, 12b'0} | ||
| lui rd, offset | 0x37 | R[rd] ← {offset, 12b'0} | |||
| jal rd, imm | UJ | 0x6f |
R[rd] ← PC + 4
PC ← PC + {imm, 1b'0} |
||
| jalr rd, rs, imm | I | 0x67 | 0x0 |
R[rd] ← PC + 4
PC ← R[rs] + {imm} |
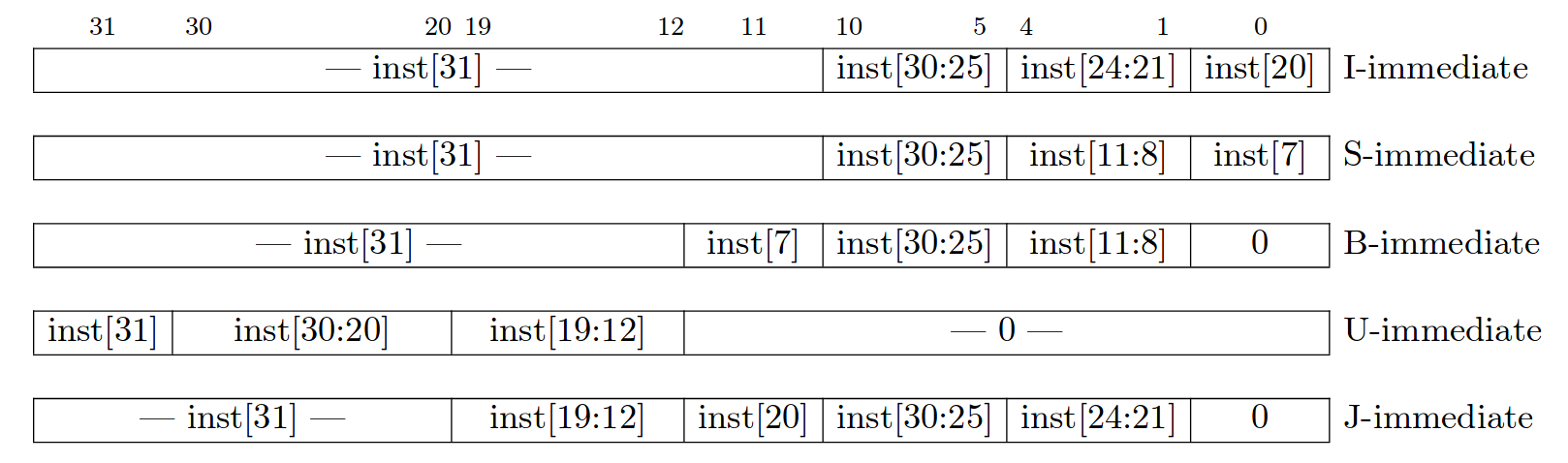
For I, S, B, U, and J type instructions, you will have to extract the appropriate immediate from the instruction. It will be helpful to create an Immediate Generator subcircuit to do this. Remember that in RISC-V, all immediates that leave the immediate generator are 32-bits and sign-extended! You may find the following diagram helpful for thinking about how to create the appropriate immediate for each type:
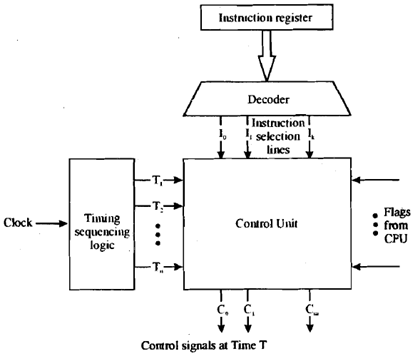
3) Controls
You can probably guess that control signals will play a very large part in this project. Figuring out all of the control signals may seem intimidating. Remember that there is not a definitive set of control signals--walk through the datapath with different types of instructions, and when you see a mux or other component think about what selector/enable value you will need for that instruction. We suggest you create a "Control Module" subcircuit that takes in an instruction and outputs the control signals for that instruction.
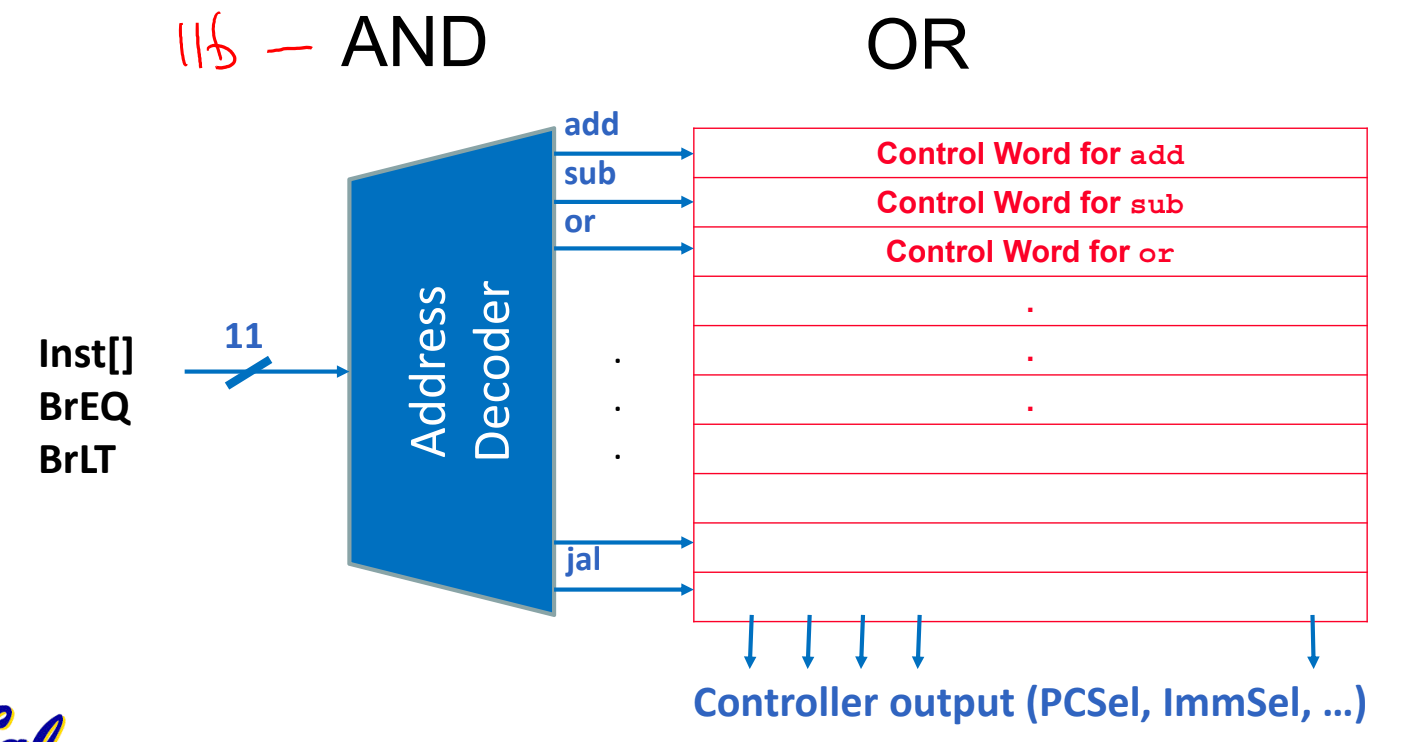
There are two major approaches to implementing the Control so that it can translate the opcode/funct3/funct7 to the corresponding instruction and then set the control signals. One way to do, ROM control was outlined in lecture. Every instruction implemented by a processor maps to an address in a ROM (read-only memory) unit. At that address in the ROM is the control word for that instruction. An address decoder takes in an instruction and outputs the address of the control word for that instruction. This approach is common in CISC architectures like Intel's x86-64, and offers some flexibility because it can be re-programmed by changing the contents of the ROM.
The other method is hard-wired control, which is usually the preferred approach for RISC architectures like MIPS and RISC-V. Hard-wired control uses "AND", "OR", and "NOT" gates (along with the various components we've learned can be built from these gates, like MUXes and DEMUXes) to produce the appropriate control signals. The instruction decoder takes in an instruction and outputs all of the control signals for that instruction.
The method you choose to implement your control unit is one of the major design decisions you get to make in this project. If you have a partner, be sure to discuss which approach you both believe is best.
4) Pipelining
Your processor will have a 2-stage pipeline:
- Instruction Fetch: An instruction is fetched from the instruction memory. (Note: while you can, please do not calculate jump address in this stage. Instead, you should try to deal with the jump control hazard.)
- Execute: The instruction is decoded, executed, and committed (written back). This is a combination of the remaining stages of a normal five-stage RISC-V pipeline.
First, make sure you understand what hazards you will have to deal with.
The instruction immediately after a branch or jump is not executed if a branch is taken. This makes your task a bit more complex. By the time you have figured out that a branch or jump is in the execute stage, you have already accessed the instruction memory and pulled out (possibly) the wrong instruction. You will therefore need to "kill" instruction that is being fetched if the instruction under execution is a jump or a taken branch. Instruction kills for this project MUST be accomplished by MUXing a nop into the instruction stream and sending the nop into the Execute stage instead of using the fetched instruction. Notice that 0x00000013, or addi x0, x0, 0 is a nop instruction; you should only kill if a branch is taken (do not kill otherwise). Do kill on every type of jump.Do not solve this issue by calculating branch offsets in the IF stage. Because we test your output against the reference every cycle, and the reference returns a nop, while it may be a conceptually correct solution, this will cause you to fail our tests.
Because all of the control and execution is handled in the Execute stage, your processor should be more or less indistinguishable from a single-cycle implementation, barring the one-cycle startup latency and the branch/jump delays. However, we will be enforcing the two-stage pipeline design. Some things to consider:
- Will the IF and EX stages have the same or different PC values?
- Do you need to store the PC between the pipelining stages?
- To MUX a nop into the instruction stream, do you place it before or after the instruction register?
- What address should be requested next while the EX stage executes a nop? Is this different than normal?
You might also notice a bootstrapping problem here: during the first cycle, the instruction register sitting between the pipeline stages won't contain an instruction loaded from memory. How do we deal with this? It happens that Logisim automatically sets registers to zero on reset; the instruction register will then contain a nop. We will allow you to depend on this behavior of Logisim. Remember to go to Simulate --> Reset Simulation (Ctrl+R) to reset your processor.
Getting Started: A Guide
We know that trying to build a CPU with a blank slate might be intimidating, so we want to guide you through how to think about this project by implementing a simple I-type instruction, addi.
Recall the five stages of the CPU pipeline:
- Instruction Fetch
- Instruction Decode
- Execute
- Memory
- Write Back
This guide will help you work through each of these stages, as it pertains to the add instruction. Each section will contain questions for you to think through and pointers to important details, but it won't tell you exactly how to implement the instruction. You may need to read and understand each question before going to the next one, and you can see the answers by clicking on the question. During your implementation, feel free to place things in subcircuits as you see fit.
Stage 1: Instruction Fetch
The main thing we are concerned about in this stage is: how do we get the current instruction? From lecture, we know that instructions are stored in the instruction memory, and each of these instructions can be accessed through an address.
-
Which file in the project holds your instruction memory? How does it connect to your cpu.circ file?
The instruction memory is the ROM module in run.circ. It provides an input into your CPU named "Instruction" and takes an output from your CPU named "fetch_addr".
-
In your CPU, how would changing the address you output to fetch_addr affect the instruction input?
The instruction that run.circ outputs to your CPU should be the instruction at address fetch_addr in instruction memory. -
How do you know what the fetch_addr should be? (Hint: it is also known as PC)
fetch_addr is the address of the current instruction being executed, so it is saved in the PC register. For this project, it's fine for the PC to start at 0, and that is the default value for registers. -
For this project, does your PC hold an address of a byte or a word?
If you look in run.circ, you will see that the address coming from your CPU goes straight into the memory module; the bits that cut off by the splitter are the upper 18 bits of the address. So fetch_addr is a word address. Whether PC is a word or a byte address is up to you as the hardware designer, but keep in mind that instructions that write PC + 4 back to the RegFile are treating PC like a byte address. -
For basic programs without any jumps or branches, how will the PC change from line to line?
The PC must increment by 1 instruction in order to go to the next instruction, as the address held by the PC register represents what instruction to execute. - We have provided the PC register in the cpu.circ file. Please implement the PC's behavior for simple programs - ignoring jumps and branches. You will have to add in the latter two in the project, but for now we are only concerned with being able to run strings of addi instructions. Where should the output of the PC register go? Remember to connect the clock! Remember that we're implementing a 2-stage pipelined processor, so the IF stage is separate from the remaining stages. What circuitry separates the different stages of a pipeline? Do you need to add anything?
Stage 2: Instruction Decode
Now that we have our instruction coming from the instruction input, we have break it down in the Instruction Decode step, according to the RISC-V instruction formats you have learned.
-
What type of instruction is addi? What are the different bit fields and which bits are needed for each?
I type. The fields are:- imm [31-20]
- rs1 [19-15]
- funct3 [14-12]
- rd [11-7]
- opcode [6-0]
-
In Logisim, what tool would you use to split out different groups of bits?
Splitter! - Implement the instruction field decode stage using the instruction input. You should use tunnels to label and group the bits.
-
Now we need to get the data from the corresponding registers, using the register file. Which instruction fields should be connected to the register file? Which inputs of the register file should it connect to?
Instruction field rs1 will need to connect to read register 1. - Implement reading from the register file. You will have to bring in your RegFile from Project 2.1. Remember to connect the clock!
-
What does the Immediate Generator need to do?
For addi, the immediate generator takes in 12 bits and produces a signed 32-bit immediate. We highly suggest you create an Immediate Generator subcircuit!
Stage 3: Execute
The Execute stage, also known as the ALU stage, is where the computation of most instructions is performed. This is also where we will introduce the idea of using a Control Module.
-
For the add instruction, what should be your inputs in to the ALU?
Read Data 1 and the immediate produced by the Immediate Generator. -
In the ALU, what is the purpose of ALU_Sel?
It chooses which operation the ALU should perform. -
Although it is possible for now to just put a constant as the ALUSel, why would this be infeasible as you need to implement more instructions?
With more instructions, the input to the ALU might need to change, so you would need to have some sort of circuit that changes ALUSel depending on the instruction being executed. - Create a new subcircuit for the Control Module. This module will need to take in as inputs the opcode, funct3, and funct7, and (for now) use these to output a value for ALUSel, depending on what the current instruction is. Read over the "Control" section above for some suggestions about different approaches for doing this. As you implement more instructions, this circuit will have to expand and become more complex.
- Bring in your ALU and connect the ALU inputs correctly.
Stage 4: Memory
The memory stage is where the memory can be written to using store instructions and read from using load instructions. Because the addi instruction does not use memory, we will not spend too much time here.
- Bring in the MEM module that we provided. At this point, we cannot connect most of the inputs, as we don't know where they should come from. However, you can still connect the clock.
Stage 5: Write back
The write back stage is where the results of the operation is saved back to the registers. Although not all instructions will write back to the register file (can you think of some which do not?), the addi instruction does.
-
Looking at the entire ISA, what are some of the instructions that will write back to a register? Where in the datapath would it get the values?
addi is an example that will take the output from the ALU and write it back. lhu will take the output from MEM and write it to a register. - Let's create the write back phase so that it is able to write both ALU and MEM outputs to the Register File. Later, when you implement branching/jumping, you may need to add more to this mux. However, at the moment, we need to choose between the ALU and MEM outputs, as only one wire can end up being an input to the register file. Bring a wire from both the ALU and MEM, and connect it to a MUX.
-
What should you use as the Select input to the MUX? What does the input depend on?
This input should be able to choose between the two MUX inputs, ALU and MEM, which means that its value depends on which instruction is executing. This suggests that the input should originate from the Control Module, as the Control Module is responsible for figuring out which instruction is executing. We'll need another control signal here, commonly called WBSel. WBSel determines which value to write back to the RegFile. -
Now that we have the inputs to the MUX sorted out, we need to wire the output. Where should the output connect to?
Because the output is the data that you want to write into the Register File, it should connect to the Write Data input on the Register File. - There are two more inputs on the Register File which are important for writing data: RegWEn and rd. One of these will come from the Instruction Decode stage and the other one will be a new control signal that you need to design. Please finish off the Writeback stage by these inputs on the RegFile correctly.
If you have successfully completed all the steps mentioned, your processor must be capable of executing addi instructions. You can verify its function by running ./cpu-sanity.sh, and the first test (CPU-addi) should pass. For the rest of the project, you are required to implement additional instructions using a similar approach, which involves connecting inputs and outputs, adding MUXes and other Logisim components, and defining new control signals. With the basic framework in place, this task should be more manageable. Good luck!
Testing
Sanity Tests
We've included 6 sanity tests for you with the starter code. You can run them using ./cpu-sanity.sh.
Understanding how the tests work
Each test is a copy of the run.circ file included with the starter code that has instructions loaded into its IMEM. When you run logisim-evolution from the command line, the clock ticks, the program counter is incremented, and the values in each of the outputs is printed to stdout.
Let's take as an example one of the 4 sanity tests included with the starter code, CPU_addi.circ. This is a very simple test that has 3 addi instructions (addi t0, x0, 5, addi t1, t0, 7, addi s0, t0, 9), meant for a first sanity check after you go through the "Getting Started" guidelines above.
If you open CPU_addi.circ in Logisim Evolution, it'll look like this:
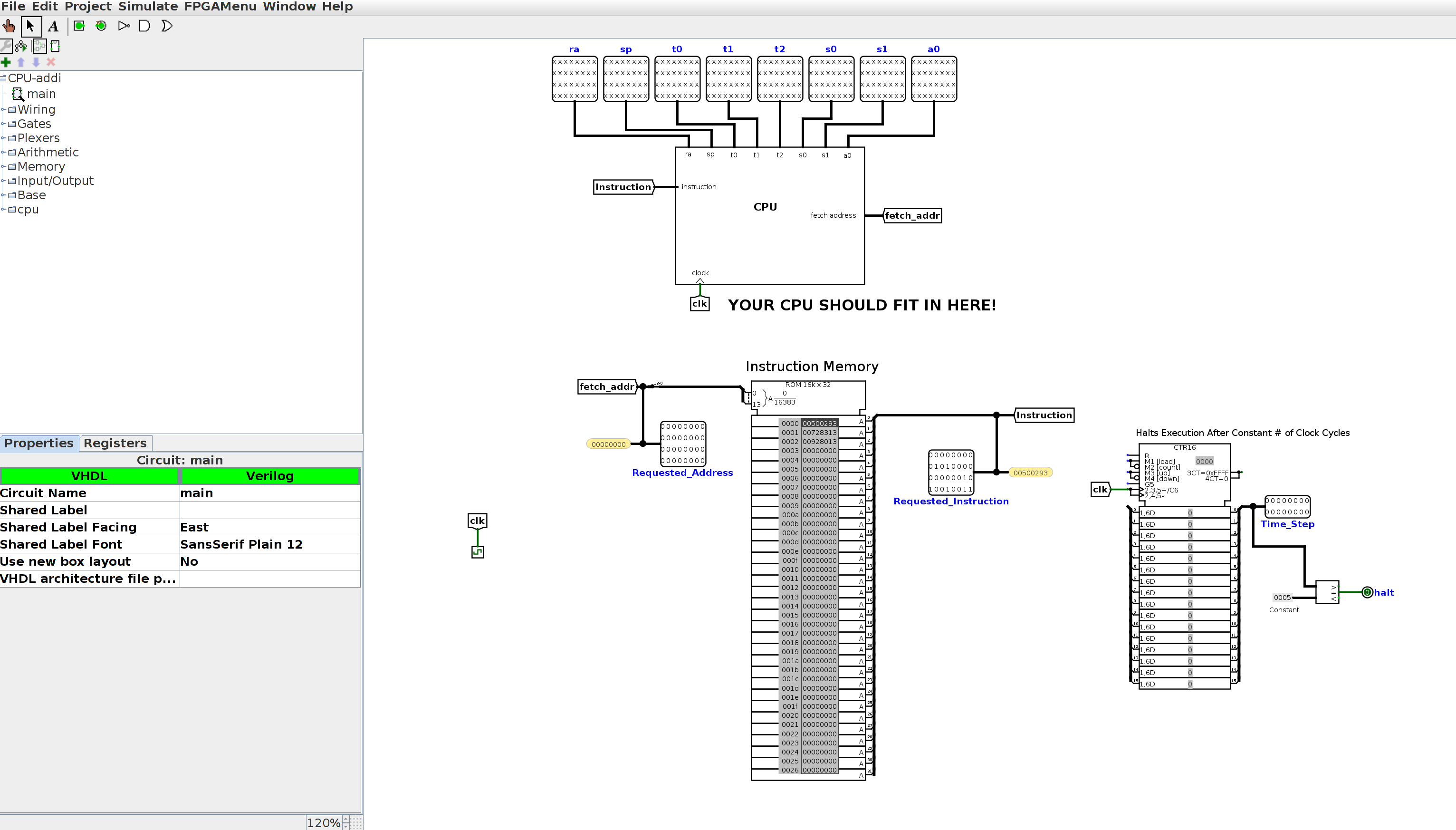
Let's take a closer look at the various parts of the test file. At the top, you'll see the place where your CPU is connected to the test outputs. With the skeleton file, you'll see all xxxx's, as you do below; when your CPU is working, this should not be the case. Your CPU takes in one input (instruction), and along with the values in each of the registers, it has one additional output: fetch_addr, or the address of the instruction to be fetched from IMEM to be executed the next clock cycle.
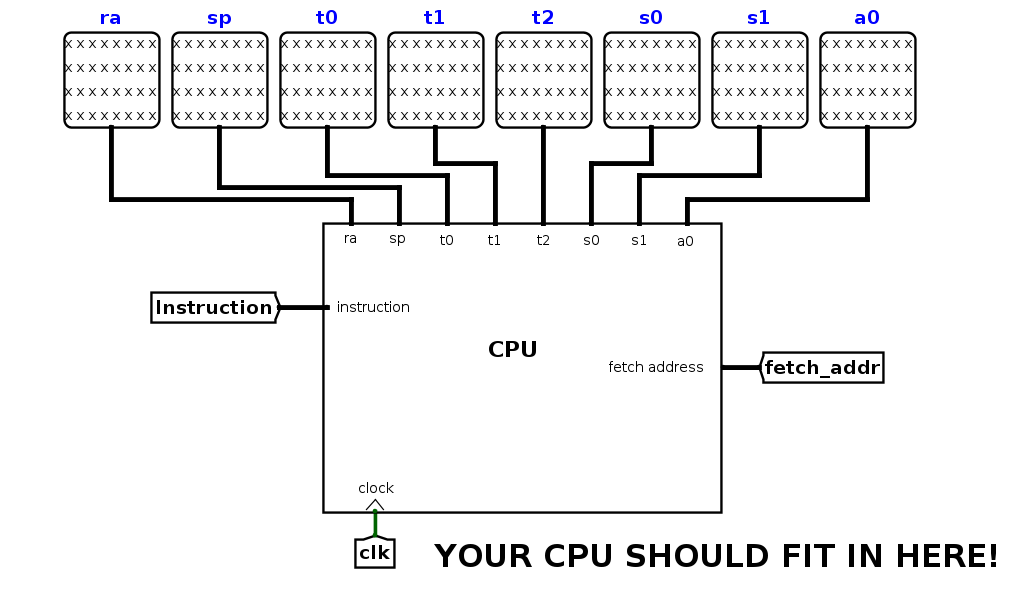
Be careful that you don't move any of the inputs/outputs of your CPU around, or add any additional inputs/outputs. This will change the shape of the CPU subcircuit, and as a result the connections in the test files may no longer work properly.
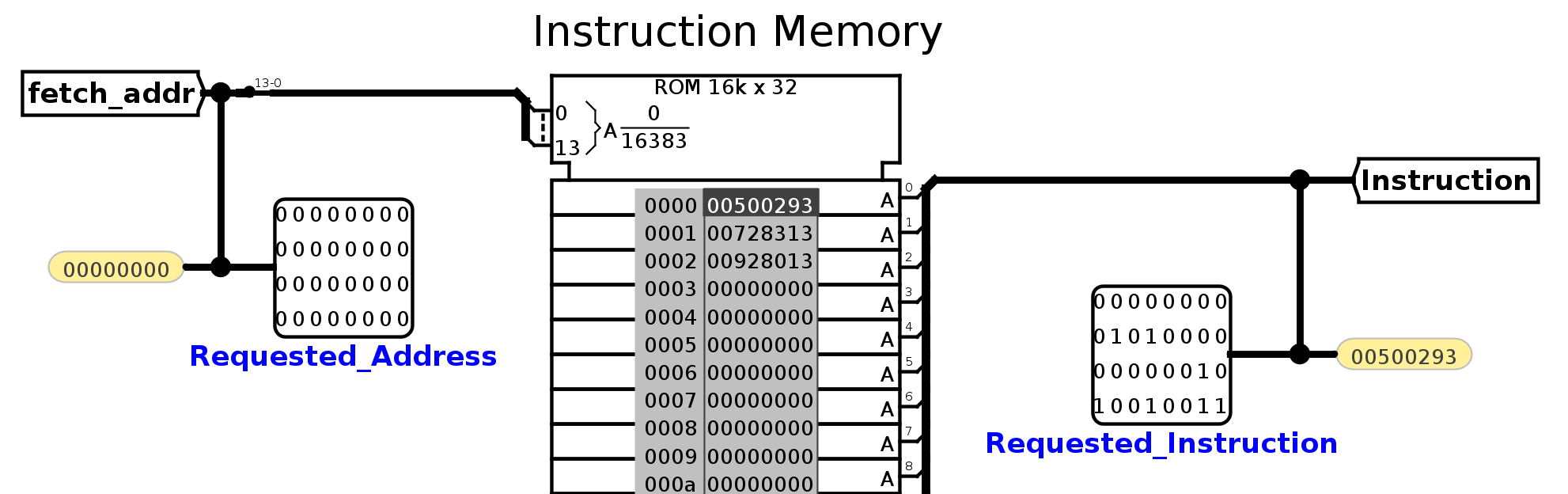
Below the CPU, you'll see instruction memory. The hex for the 3 addi instructions (0x00500293, 0x00728313, 0x00928413) has been loaded into instruction memory. Instruction memory takes in one input (called fetch_addr) and outputs the instruction at that address. fetch_addr is a 32-bit value, but because Logisim Evolution caps the size of ROM units at 2^16B, we have to use a splitter to get only the bottom 14 bits of fetch_addr. Notice that fetch_addr is a word address, not a byte address.
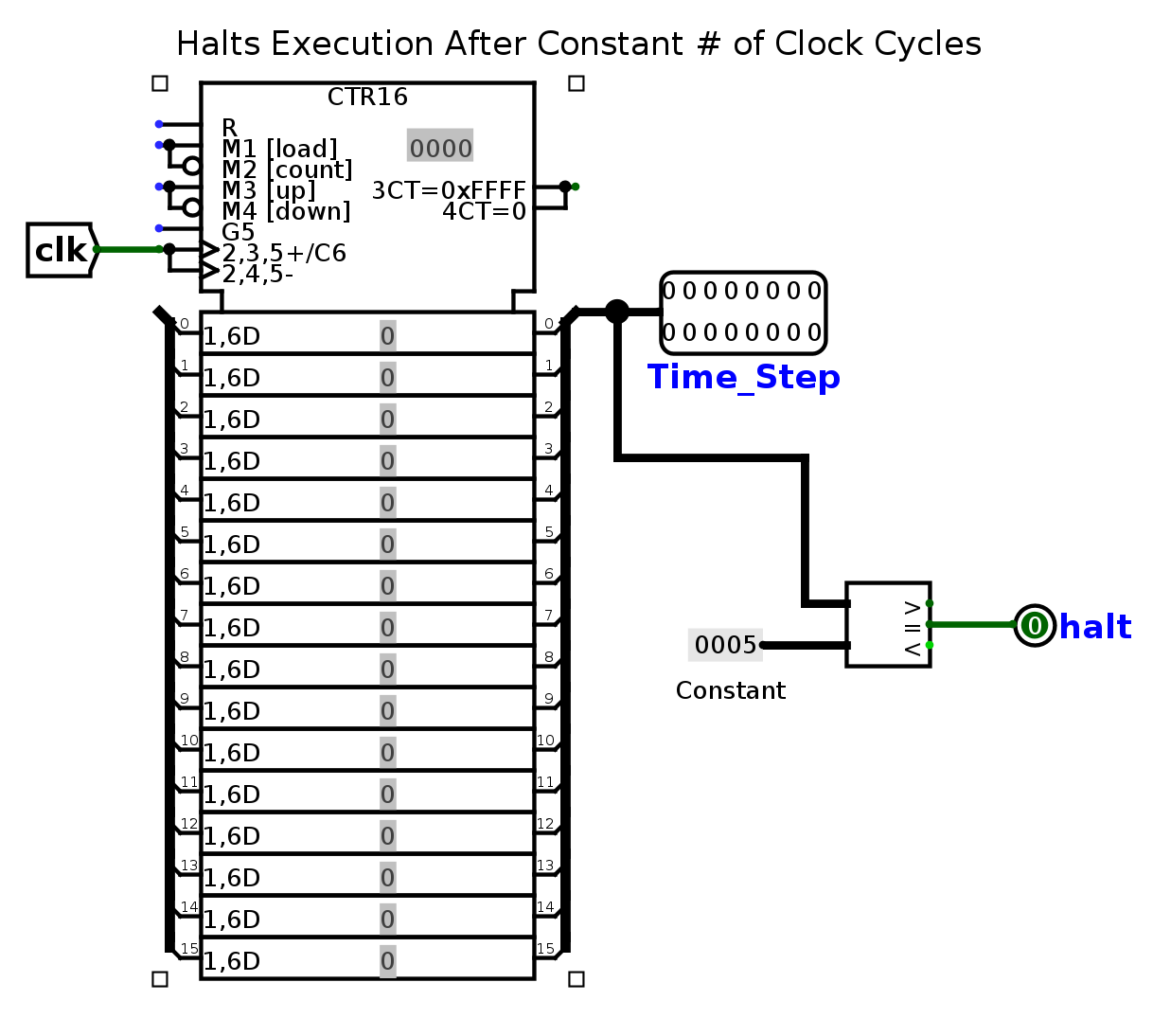
So what happens when the clock ticks? Each tick of the clock increments an input in the test file called Time_Step. The clock will continue to tick until Time_Step is equal to the halting constant for that test file (for this particular test file, the halting constant is 5). At that point, the Logisim Evolution command line will print the values in each of your outputs to stdout. Our tests will compare this output to the expected; if your output is different, you will fail the test.
Sanity Tests
Six sanity tests have been included for you with the starter code: CPU-addi.circ, CPU-add_lui_sll.circ, CPU-mem.circ, CPU-branch.circ, CPU-br_jalr.circ, and CPU-jump.circ. You can see the .s files and hex corresponding to each of these tests in the tests/input directory. Run them using the following command from your main Project 2.2 directory:
$ ./cpu-sanity.sh
Like in Project 2.1, we've included a Python script to make it a bit easier to interpret your test output. It's called binary_to_hex.py. It is in the tests/circ_files directory. You can run it on the reference output for CPU-addi.circ with the following command:
$ python binary_to_hex.py reference_output/CPU-addi.out
or, on your CPU's output with the following command:
$ python binary_to_hex.py output/CPU-addi.out
Writing your own tests
The autograder tests fall into 3 main categories: unit tests, integration tests and edge case tests. We won't be revealing to you what these tests are specificaly, but you should be able to re-create a very close approximation of them on your own in order to test your datapath.
What is a unit test? A unit test exercises your datapath with a single instruction, to make sure that each individual instruction has been implemented and is working as expected. You should write a different unit test for every single instruction that you need to implement, and make sure that you test the spectrum of possibilities for that instruction thoroughly. For example, a unit test slt should contain a case both where rs1 < rs2 and where rs1 !< rs2.
What is an integration test? After you've passed your unit tests, move onto tests that use multiple functions in combination. Try out various simple RISC-V programs that run a single function; your CPU should be able to handle them, if working properly. Feel free to use riscv-gcc to compile C programs to RISC-V, but be aware of the limited instruction set we're working with (you don't have any ecall instructions, for example).
Finally, edge cases! What edge cases should you look for? A hint from us: our 2 main classes of edge cases come from memory operations and branch/jump operations (we call them something along the lines of "mem-full" and "br-jump-edge"). Think about all the different ways these operations could go wrong.
Creating your tests
For this project, we will not be releasing all the tests. However, we have included some scripts to make test creation a little bit easier on you. Included in the starter code is a file called create_test.py. It expects 1 argument: .s files containing the RISC-V code you wish to test. The script will then generate copies of run.circ with your new tests loaded in for you, along with some other files. For everything to work properly:
- Write your tests and name them whatever you would like, but be sure to save them as .s files
- Don't move the tests anywhere, keep them (as well as create_test.py) in the root directory of the project
- Run:
$ python create_test.py <test 1 name here>.s <test 2 name here>.s ...
Your file hierarchy should now contain some new things:
proj2.2 -- <test name here>.s # Your test -- my_tests -- circ_files -- <alu, cpu, mem, regfile>.circ # All your circuits -- output -- reference_output -- CPU-<test name here>.circ # The new circuit containing your test -- input -- <test name here>.hex # The hex dissasembly of your test -- <test name here>.s # A copy of your test
Now that everything is created, to test your own tests, run:
$ ./cpu-user.sh
If you wish to delve into your the circuit running your test, you can simulate it by opening up the CPU-<test name here>.circ file. If you don't remember how to simulate your circuit, please refer back to the Logism labs. We highly encourage you to poke your circuit while the test is running to observe how your circuit reacts to various inputs (perhaps this can give you ideas for new tests to write).
If you wish to simulate your code only for a certain number of cycles, you can do that by running the following:
$ python create_test.py <test name here>.s -n <number of cycles>
If you would like to decode your output, use the provided binary_to_hex.py on the appropriate .out file in the output folder shown above. Be aware that because you're implementing a 2-stage pipelined processor and the first instruction writes on the rising edge of the second clock cycle, the effects of your instructions will have a 2 instruction delay. For example, let's say I have written a test with one instruction:
$ addi t0, x0, 1
The output will actually come out to be:

Note how t0 doesn't get changed until line 3. NOTE: This testing harness assumes you have the 2-stage pipeline implemented. You should first concern yourself with getting the single-cycle working, then the 2-stage, then the sanity tests, and then your own tests. The sanity tests do NOT test every instruction mentioned in the spec, so make sure you are writing extra tests!
Our testing harness is using some features of Venus that are still in beta. If you have find any bugs, please let us know on Piazza. Thank you!
Submission
When your project is done, please submit all the files including the framework to your remote GitLab repo.
You will NOT be submitting extra files. If you add a helper circuit, please place the circuit only in alu.circ, regfile.circ, mem.circ and cpu.circ. Only changes to these four files will be considered by the autograder. If you do not follow these requirements, your code will likely not compile and you will get a zero on the project.
How to Autolab
Similarly to Project2.1, upload your autolab.txt to Autolab to submit your project.
Submission Time Announcement
The last time of your submission to the git repo will count towards your submission time - also with respect to slip days. So do not commit to this git after the due date, unless you want to use slip days or are OK with getting fewer points.
Collaborative Coding and Frequent Pushing
You have to work at this project as a team. We invite you to use all of the features of gitlab for your project, for example branches, issues, wiki, milestones, etc.